
This robot vehicle was built to compete in the SkillsUSA event Robotics: Urban Search & Rescue: Explosive Ordinance Disposal. It received silver at the local competition level.
Objective: Build a remote-controlled robot that can efficiently remove wooden blocks from mailboxes in a simulated urban area.
A TETRIX MAX Urban Search & Rescue Challenge kit was provided and included robot parts, a camera, batteries, and a controller.

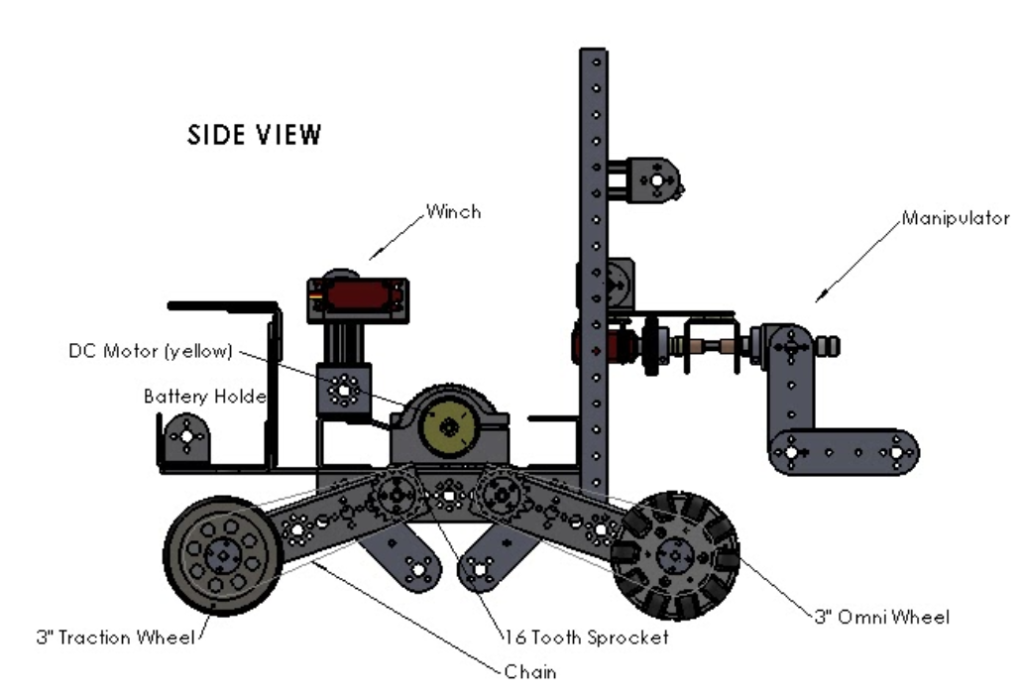
Drivetrain: The robot vehicle was built with a raised drive train in which 2 traction wheels and 2 omni-wheels were put on “legs” and attached to the body at an angle. This allowed to the vehicle to withstand terrain and small obstacles while driving. Since the wheels were attached to the ends of “legs”, they were rotated with a chain and sprocket system.

Arm: The arm featured a winch and pulley system that allowed the manipulator to be easily raised and lowered.

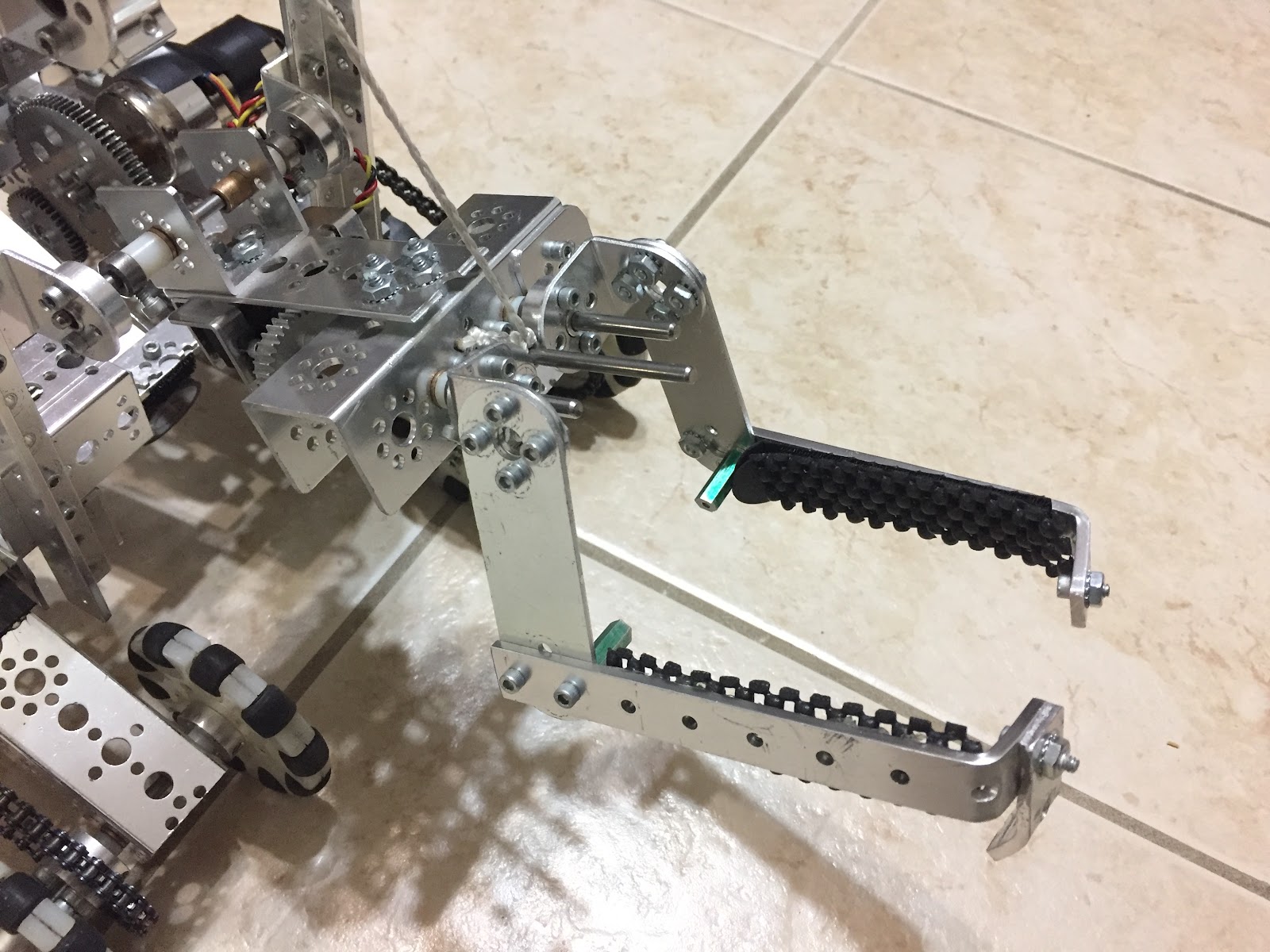
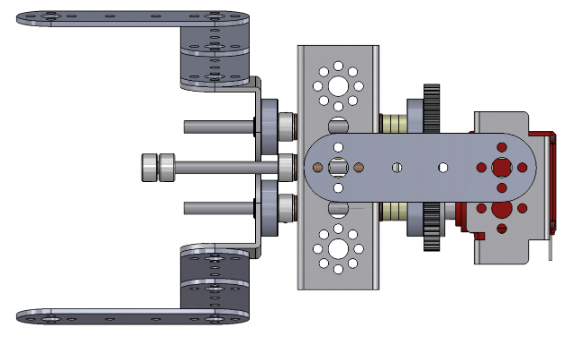
Manipulator: To actually grab the wooden blocks, we created a geared, 2-pronged “clapper” that would open up and out like wings and then close together to grab. The prongs are long and narrow so they are able to reach inside the narrow openings of the mailboxes.
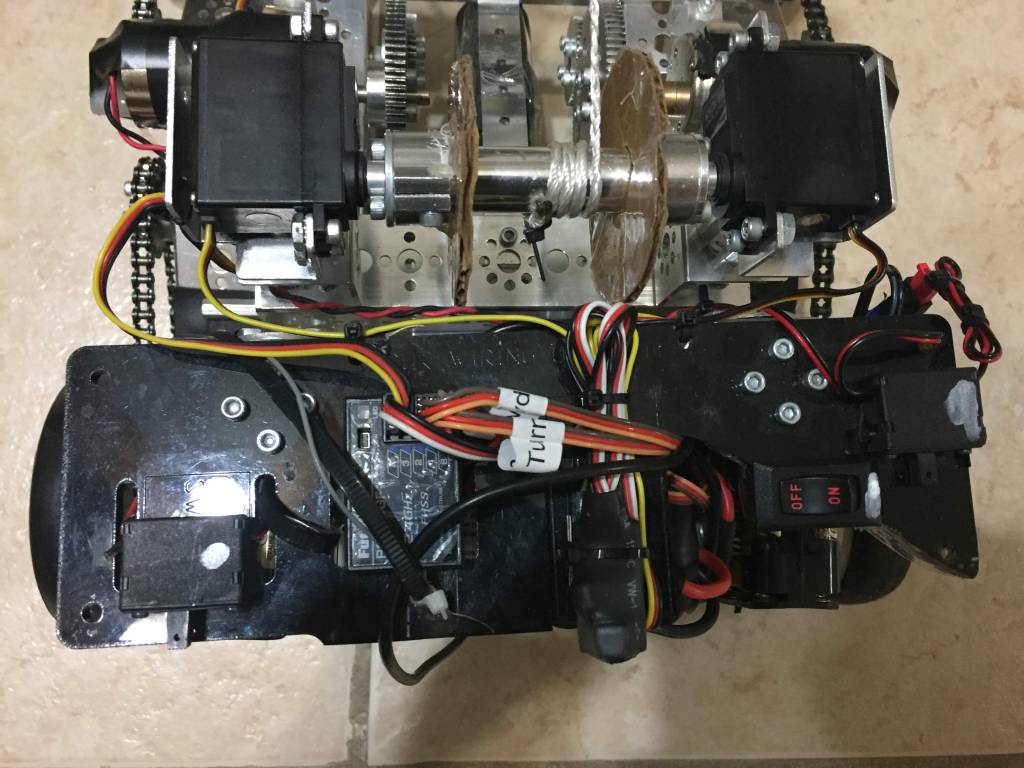
The TETRIX motor controller and the Futaba R2004GF 4-Channel receiver were “programmed” through wiring, so no actual coding (with ROBOTC and such) was required.
Technical drawings of the robot and its parts, done in SolidWorks:



Photographs of the robot at completion:




The engineer notebook is below, with more details on the design process and reflections.
